









多傳感器數據融合的自動駕駛汽車
Synthesize:
第四種方法Synthesize是將感知數據融合在一起,你可能會遇到這樣的情況,傳感器X和傳感器Z都沒有在各自的視場內探測到物體。在這種情況下,沒有傳感器知道這個物體的存在,但是可以通過一些其他的感觀數據,比如聲音,間接地弄清楚在視場之外的物體情況。自動駕駛汽車是時刻運動的,所以要求這種預判是瞬間發生的,像上文提到的一樣,是實時的。
基于以上四種方法的解釋,當各種不同傳感器收集回來的數據結合在一起時,使用什么方法來處理這些數據呢?
絕對排序法:在這種方法中,需要事先決定一個傳感器的排序。比如,攝像投的級別高于雷達,或者雷達的級別高于攝像頭等等。在傳感器融合過程中,子系統使用預先確定的排序。比如,在Reconcile情況中,在交叉的視場FOV中,X檢測到了物體,但是Z沒有檢測到,而攝像頭傳感器X的級別高于雷達傳感器Z,那么Z的檢測結果不納入考慮范圍內也是允許的。這個方法簡單、快速、易實現,但是綜合考慮,這種方法并不嚴謹。
情況排序法:這種方法與絕對排名法相似,但不同之處在于,根據所處的環境,排名是可變的。例如,我們可能已經設置好,如果有下雨的天氣,攝像頭容易受到雨水干擾,進而攝像頭優先級降低,雷達擁有最高優先級。這種方法相對簡單、快速、易于實現。然而,從全局角度看,它依然有所不足。
平等投票(協商一致)法:在這種方法中,允許每個傳感器進行投票且投票能力都是平等的。然后使用一個計數算法,該算法與投票結果相匹配。如果傳感器的某個閾值都同意某個物體,而某些閾值不同意,那么就允許這個閾值決定人工智能系統做出判斷。同樣,這種方法綜合看起來依然有所不足。
加權投票法:有點類似于平等投票的方法,這種方法增加了一個權重,并選擇假設一些傳感器比另一些傳感器更重要。比如,系統可能傾向于認為攝像頭比雷達更可靠,所以給攝像頭一個更高的加權系數等。
概率投票法:還可以引入概率概念。傳感器有自己的控制子系統,可以確定傳感器是否得到了真實的數據,然后將概率使用到多個傳感器的投票方法中。
爭論方法:還有一種新的方法是讓每個傳感器“辯論”為什么他們的報告是合適的。這是一個比較有趣的概念。相關研究和實驗正在進行中。
優先到達法:即優先報告結果的傳感器獲勝。出于計時的目的,系統不會等待其他傳感器報告,從而加快傳感器的融合工作。但是從另一個角度講,無法預測下一秒鐘其他傳感器是否會報告相反的判斷,這存在一定的安全隱患。
最可靠法:在這種方法中,需要跟蹤自動駕駛汽車上無數傳感器的可靠性。當存在各個傳感器之間的數據爭議時,最可靠的傳感器將“獲勝”。
在設計自動駕駛汽車時,可以在傳感器融合子系統中使用以上的幾種方法。當子系統確定一種方法可能優于另一種方法時,它們就可以各自發揮作用。當然,MSDF也可以通過很多其它的本文未提及的方法進行。
多個傳感器之間的差異非常重要
人類的聽覺和視覺是不一樣的。當人類聽到警報聲時,使用耳朵這種感官。耳朵不像眼睛,眼睛不能聽聲音。這個例子可以生動地說明,在自動駕駛領域,一定有許多不同類型的傳感器,多傳感器融合MSDF的首要任務是,要利用不同種傳感器的優勢,同時最小化或弱化每種傳感器的弱點。

上圖中,每一種傳感器的一個重要特征都是它能夠探測到目標的距離。傳感器能夠探測到的距離越遠,人工智能駕駛任務的提前時間和優勢就越大。但是,一些研究結果標明,較遠端的數據可能缺乏特征或者缺乏可信度。隨著技術的日新月異,需要根據所涉及的距離確定傳感器融合的優缺點。以下是一些常用傳感器的探測數據(隨著技術的進步,以下數據可能隨時更新):
Main Forward Camera: 150 m (about 492 feet) typically, condition dependent
Wide Forward Camera: 60 m (about 197 feet) typically, condition dependent
Narrow Forward Camera: 250 m (about 820 feet) typically, conditions dependent
Forward Looking Side Camera: 80 m (about 262 feet) typically, condition dependent
Rear View Camera: 50 m (about 164 feet) typically, condition dependent
Rearward Looking Side Camera: 100 m (about 328 feet) typically, condition dependent
Radar: 160 m (about 524 feet) typically, conditions dependent
Ultrasonic: 8 m (about 26 feet) typically, condition dependent
LIDAR: 200 m (about 656 feet) typically, condition dependent
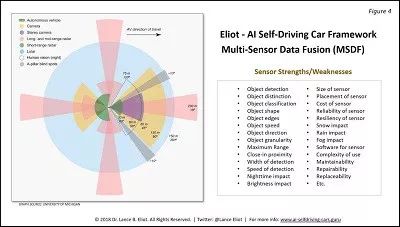
有專家稱,在比較各種類型的傳感器時,業內有許多圖表試圖描述這些傳感器的優點和缺點。專家建議不要盲目相信的這些對比圖表。因為用于比較傳感器的標準非常多,但是一些常見圖表僅僅提取幾個典型特征進行對比,缺乏可信度。如下圖(僅供參考):
筆者觀點:在自動駕駛領域,傳感器是一個非常博眼球的字眼。但是,一旦涉及具體技術和魯棒性,目前并沒有太多的企業或技術型公司給出一份值得信服的答卷。業內普遍認為,自動駕駛汽車的未來是保障人的安全,而保障人的安全都依賴于多傳感器融合MSDF。人類每時每刻都在做著“多傳感器融合”的工作,想要將自動駕駛汽車的多傳感器融合做到像人類一樣盡善盡美,還有很多復雜的工作要做。

 分享
分享
請輸入評論內容...
請輸入評論/評論長度6~500個字









最新活動更多

先進LED照明系統,引領未來趨勢新標桿")


- 1 AI狂歡遇上油價破百,全球股市還能漲多久? | 產聯看全球
- 2 OpenAI深夜王炸!ChatGPT Images 2.0實測:中文穩、細節炸,設計師慌了
- 3 6000億美元估值錨定:字節跳動的“去單一化”突圍與估值重構
- 4 Tesla AI5芯片最新進展總結
- 5 連夜測了一波DeepSeek-V4,我發現它可能只剩“審美”這個短板了
- 6 熱點丨AI“瑜亮之爭”:既生OpenClaw,何生Hermes?
- 7 AI界的殺豬盤:9秒刪庫跑路,全員被封號,還繼續扣錢!
- 8 2026,人形機器人只贏了面子
- 9 DeepSeek降價90%:價格屠夫不是身份,是戰略
- 10 AI Infra產業鏈卡在哪里了?


