









ROS:用于Automated Driving的模塊化軟件架構
性能
實時性:在當前的系統架構下,由于缺失節點執行和消息傳遞優先級的時間保證,ROS并不具有實時特性。ROS最初設計的目標機器人是PR2,當時只是應用于科研領域因此不需要考慮實時性方面的問題,但伴隨ROS已走過11個年頭,其得到了極大的推廣和應用,盡管依然存在不少局限性但依然無法掩蓋它的鋒芒。已發布的ROS2已具有實時特性,并相比ROS1提高了系統的穩定性、安全性及分布式處理能力,關于ROS1與ROS2的區別主要如下所示,后續樓主會專門寫一篇兩者的對比文章。

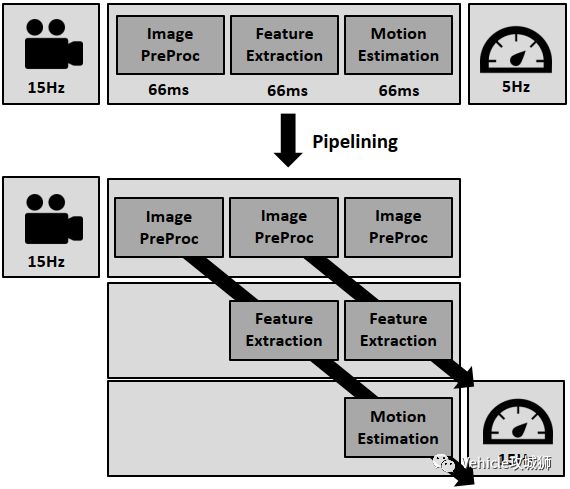
Node Pipelining:在自動駕駛汽車中,特定的任務以預先定義的恒定速率計算是有益的,例如基于視覺的定位,其輸入圖像以15Hz記錄,那位置的更新通常也應在15Hz速率下。如果是串行處理方式,那從圖像獲取到內部處理再到結果輸出,其整個更新速率顯然不是15Hz。但如果將單個或多個處理步驟分解成更小的單元則可滿足期望的時間限制,這就是Node Pipelining的概念。
仿真和調試
離線處理:為了仿真和分析子系統及調試系統關鍵錯誤。對系統中傳遞的數據進行有選擇的記錄是ROS的基礎特性。
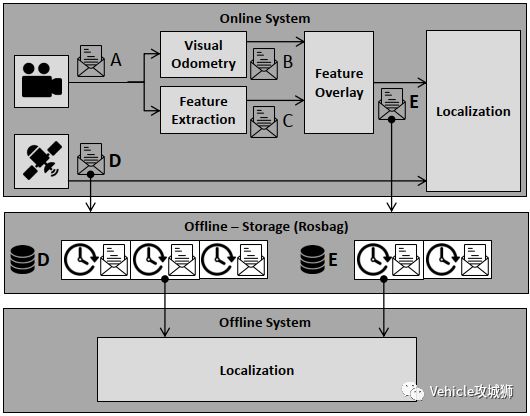
以一個簡化的視覺定位的案例具體說明下,如上圖所示,用于定位組件的輸入信息以Rosbag的形式記錄并存儲下來,存儲的數據會保留時間戳及消息內容,以便及時準確的重放所有實時數據用于離線系統的仿真模擬或數據分析。另外,依賴于硬件設備,尤其是網絡帶寬和存儲的吞吐量,所有主題信息都可在車輛行駛時在線記錄以分析關鍵駕駛場景和決策,如路徑規劃和控制等。

仿真: ROS的模塊化消息架構允許數據輸入源的更換,因此節點可很容易的基于記錄的數據進行測試。如果在仿真時還需要用戶手工輸入一些信息,那么Rviz(一個強大的可視化調試和仿真工具)則提供了一系列交互式標簽以用于定位和定向障礙物等。

 分享
分享
請輸入評論內容...
請輸入評論/評論長度6~500個字









最新活動更多

先進LED照明系統,引領未來趨勢新標桿")


- 1 AI狂歡遇上油價破百,全球股市還能漲多久? | 產聯看全球
- 2 OpenAI深夜王炸!ChatGPT Images 2.0實測:中文穩、細節炸,設計師慌了
- 3 6000億美元估值錨定:字節跳動的“去單一化”突圍與估值重構
- 4 Tesla AI5芯片最新進展總結
- 5 連夜測了一波DeepSeek-V4,我發現它可能只剩“審美”這個短板了
- 6 熱點丨AI“瑜亮之爭”:既生OpenClaw,何生Hermes?
- 7 AI界的殺豬盤:9秒刪庫跑路,全員被封號,還繼續扣錢!
- 8 2026,人形機器人只贏了面子
- 9 DeepSeek降價90%:價格屠夫不是身份,是戰略
- 10 AI Infra產業鏈卡在哪里了?


