









當前位置:
OFweek 人工智能網
> 正文
LaserNet:一種高效的自動駕駛概率三維目標探測器
2019-05-16 10:09
智車科技IV
關注
本文介紹了一種基于激光雷達數據的激光網絡自動駕駛三維目標檢測方法——LaserNet。高效的處理結果來自于在傳感器的自然距離視圖中處理激光雷達數據。在激光雷達視場范圍內的操作有許多挑戰,不僅包括遮擋和尺度變化,還有基于傳感器如何捕獲數據來提供全流程信息。
本文介紹的方法是使用一個全卷積網絡來預測每個點在三維物體上的多模態分布,然后有效地融合這些多模態分布來生成對每個對象的預測。實驗表明,把每個檢測建模看作一個分布,能獲得更好的整體檢測性能。基準測試結果表明,相比其他的檢測方法,本方法的運行時間更少;在訓練大量數據來克服視場范圍目標檢測問題上,本方法獲得最佳性能。
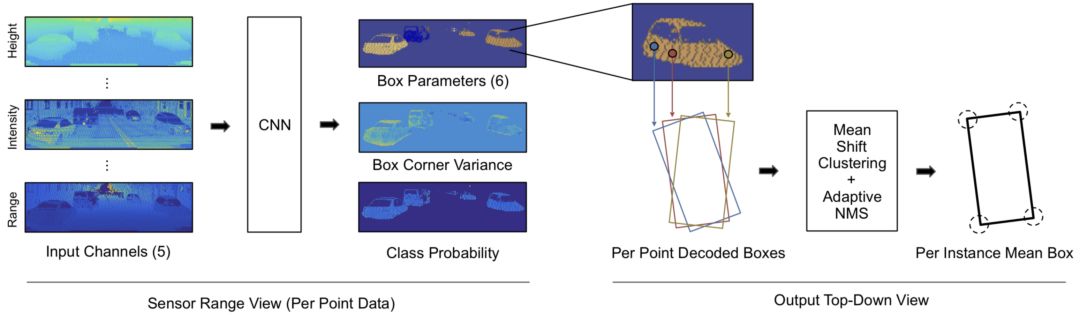
LaserNet通過以下幾個步驟實現三維檢測:
使用傳感器的固有范圍視場來構建一個密集的輸入圖像;
圖像通過全卷積網絡生成一組預測;
對于圖像中的每個激光雷達點,預測一個類概率,并在俯視圖中對邊界框架進行概率分布回歸;
每個激光雷達點分布通過均值漂移聚類進行組合,以降低單個預測中的噪聲;
檢測器進行端到端訓練,在邊界框架上定義損失;
用一種新的自適應非最大抑制(NMS)算法來消除重疊的邊框分布。

上圖為深層聚合網絡架構。列表示不同的分辨率級別,行表示聚合階段。

上圖為特征提取模塊(左)和特征聚合模塊(右)。虛線表示對特征圖進行了卷積。

 分享
分享
聲明:
本文由入駐維科號的作者撰寫,觀點僅代表作者本人,不代表OFweek立場。如有侵權或其他問題,請聯系舉報。
請輸入評論內容...
請輸入評論/評論長度6~500個字









最新活動更多

先進LED照明系統,引領未來趨勢新標桿")


- 1 AI狂歡遇上油價破百,全球股市還能漲多久? | 產聯看全球
- 2 OpenAI深夜王炸!ChatGPT Images 2.0實測:中文穩、細節炸,設計師慌了
- 3 6000億美元估值錨定:字節跳動的“去單一化”突圍與估值重構
- 4 Tesla AI5芯片最新進展總結
- 5 連夜測了一波DeepSeek-V4,我發現它可能只剩“審美”這個短板了
- 6 熱點丨AI“瑜亮之爭”:既生OpenClaw,何生Hermes?
- 7 AI界的殺豬盤:9秒刪庫跑路,全員被封號,還繼續扣錢!
- 8 2026,人形機器人只贏了面子
- 9 DeepSeek降價90%:價格屠夫不是身份,是戰略
- 10 AI Infra產業鏈卡在哪里了?


